新一代信息技術
一種基于輪廓的角點檢測方法
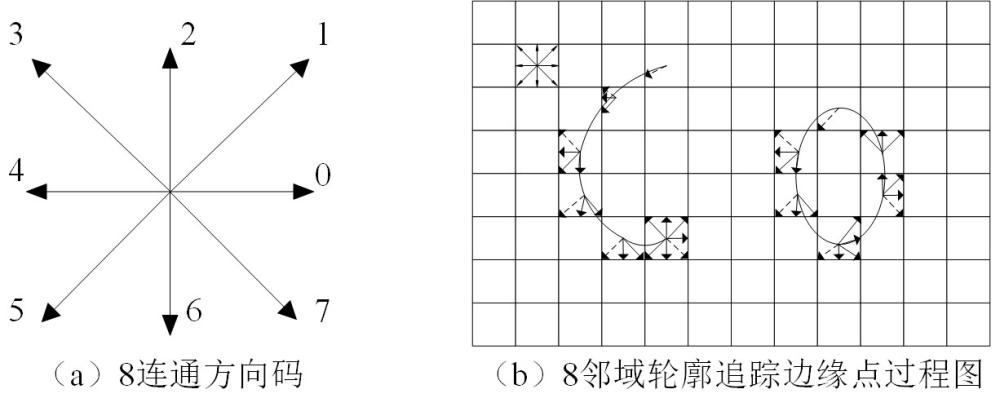
在數(shù)字圖像處理中�����,角點檢測作為圖像特征提取的一部分被廣泛用于形狀提取與分析��、目標配準與匹配�、圖像壓縮等領域,與工業(yè)現(xiàn)場的工件的測量�����、識別與定位有著密不可分的關系。針對目前工業(yè)上對工件進行角點提取時定位準確度低����、檢測時間長等問題,本文提出一種基于輪廓的角點檢測算法�����,采用八鄰域輪廓跟蹤法對預處理后的圖像進行輪廓提取�����,計算輪廓點的尖銳度����,通過非極大值抑制得到候選角點,采用SUSAN圓形模板和支撐區(qū)域自適應方法對候選角點進行優(yōu)化��。實驗結果表明����,該算法抗干擾性高,定位精確����,速度較快。
長春工業(yè)大學
授權發(fā)明